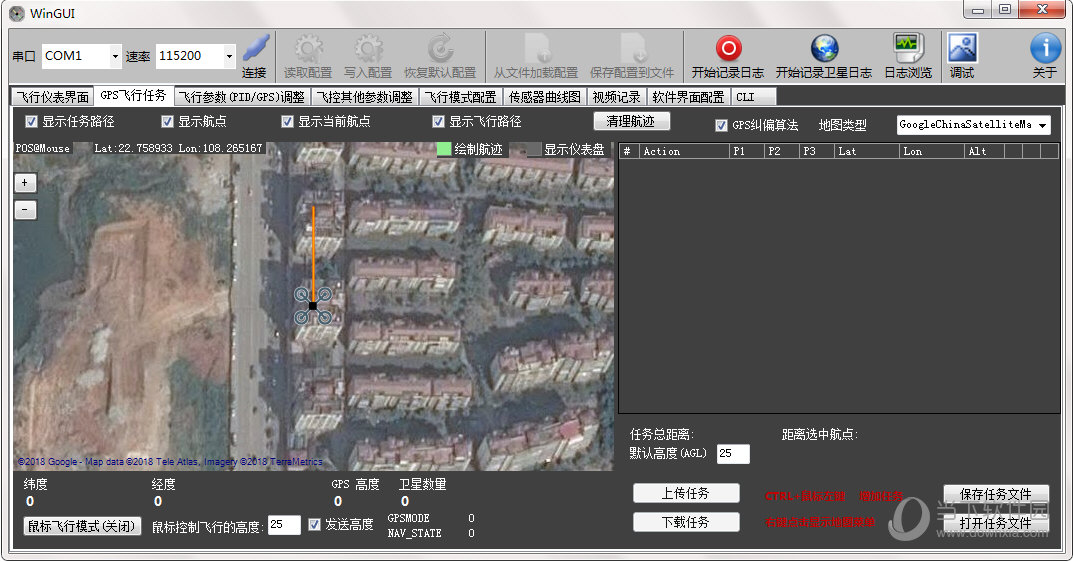
无人机控制系统|WinGUI(四翼飞行器控制软件) V2.4 中文绿色版下载
WinGUI是一款专业实用的四翼飞行器软件,它能够帮助用户管理无人机飞行器,分享校准加速度计、校准磁力计。显示飞行仪表界面、开启GPS飞行任务、调整PID/GPS飞行参数及其他参数,配置飞行模式,显示传感器曲线,可启用GPS移动滤波,开始记录卫星日志等功能。
【功能特点】
1、飞行仪表界面
2、开启GPS飞行任务
3、调整PID/GPS飞行参数
4、飞控其他参数调整
5、遥控配置
6、传感器曲线图
7、视频记录
8、软件界面配置

【四翼飞行器构造】
四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1 和旋翼3 逆时针旋转,旋翼2 和旋翼4 顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
典型的传统直升机配备有一个主转子和一个尾浆。他们是通过控制舵机来改变螺旋桨的桨距角,知识兔从而控制直升机的姿态和位置。四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,知识兔从而控制飞行器的姿态和位置。由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力不稳定,所以需要一种能够长期确保稳定的控制方法。四旋翼飞行器是一种六自由度的垂直起降机,因此非常适合静态和准静态条件下飞行。但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
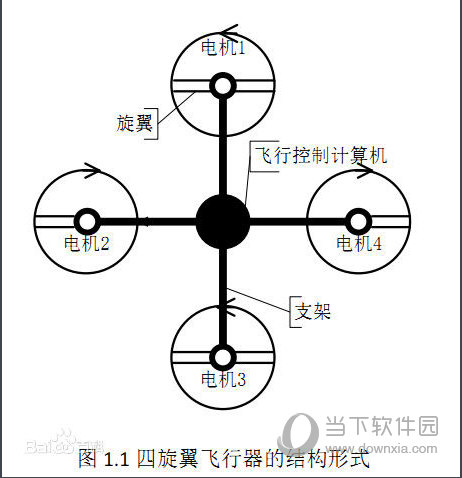
四旋翼飞行器的结构形式如图所示,电机1 和电机3 逆时针旋转的同时,电机2 和电机4 顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。与传统的直升机相比,四旋翼飞行器有下列优势:各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1 和电机3 逆时针旋转的同时,电机2 和电机4 顺时针旋转,知识兔可以平衡旋翼对机身的反扭矩。
下载仅供下载体验和测试学习,不得商用和正当使用。

![PICS3D 2020破解版[免加密]_Crosslight PICS3D 2020(含破解补丁)](/d/p156/2-220420222641552.jpg)



![Flip PDF Professional破解版[亲测可用]_Flip PDF Professional 2.4.10.3激活版(含破解补丁)](/d/p156/2-20110F9331VH.jpg)